2024年高考的前一天,小米进行了OTA。而高考第一天的语文作文题目,包含了一条“跟着互联网的普及、东谈主工智能的哄骗,越来越多的问题能很快赢得谜底。那么,咱们的问题是否会越来越少?”。刚好和小米的此次OTA比拟贴合,亦然与东谈主工智能哄骗谋划,但不是东谈主类设问、AI回话。而是,AI给东谈主类找出稳当的智能驾驶处分有想象(谜底)。
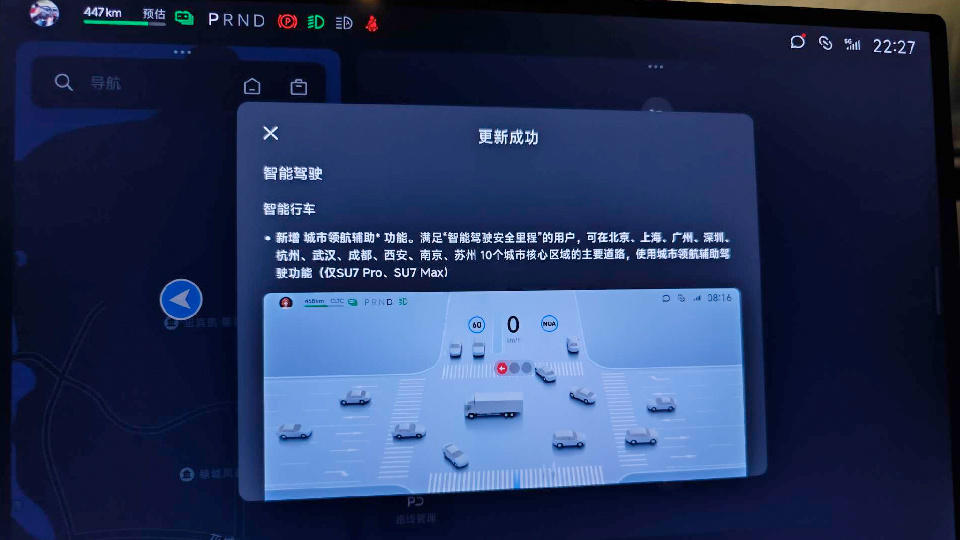
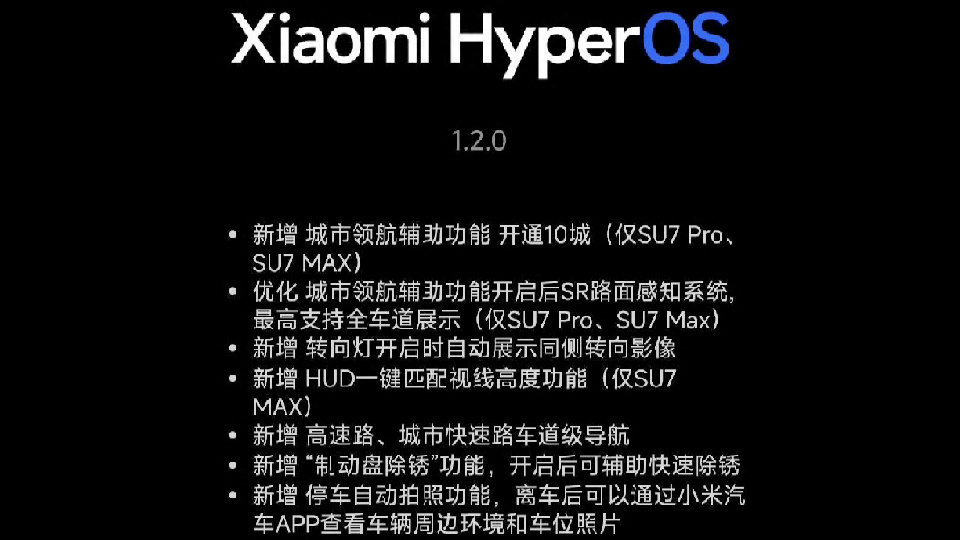
小米SU7的OTA 1.2.0莫得跳票,见效在商定的时期推送给了车主们,而在6月6日今日,也还是有不少车主OTA完成。此次OTA的功能,包括了城区NOA开放十城、驻车空间推出“小憩模式”、因循导入更多米家成立。
最中枢的功能,即是十个城市的城区NOA功能。但此次OTA后思使用这个功能,还需要清闲“智能驾驶安全里程”要求的用户才可以优先使用,而累计达到 1000km智驾里程的用户,统计时期为止2024年5月31日00:00。
OTA之后的小米,会和华为越来越近么?
建议这个疑问的起点,是,小米此次的OTA主要补皆了城区NOA这个功能,亦然将来几年内国内接济驾驶市集必须卷的一个边界。而华为的ADS在本年内还是有想法要推出ADS 3.0版块,这个版块主要针对提高的亦然城区NOA的性能,可以预想的是这个版块将会愈加拟东谈主化的去向理城市工况的接济驾驶。
那,此次更新之后是不是可以超了理思,更接近华为的体验了?
城区NOA,小米看皆华为了

关于第一次造车的品牌,第一次推送的城区NOA功能,咱们不应该抱有太大期待,这才是一个合理的预期值。这种期间常常需要高频次的迭代更新之后,才会趋于练习。此次OTA更新之后,谋划测试的视频莫得被实时放出,原因是需要一个1000km智能接济驾驶的辘集,才能启程城区NOA功能的使用。
揣摸大部分用户被上头提到的要求所限制,延后了一段时期才能使用。不外咱们其实也可以通过之前的直播视频,以及这套期间背后的底层逻辑,来分析一下这个初代版块的城区NOA,够不够好用,当今是处于一个什么级别?
期间层面,可以参预第一梯队。

在期间方面,小米汽车的智驾体系带来了一些新东西,或者说在传统期间层面作念了一定的改革。发布会上先容过,这套智能驾驶软件底层算法,用的是变焦BEV期间和超分袂率OCC占用收集以及谈路大模子作念出来的。
传统的BEV收集,能提供车辆周围的二维俯瞰图,但莫得高度信息,是以不可提供三维建模。一般情况下,会遴荐匹配其他收集,举例华为ADS 2.0选了GOD收集来作念三维建模的使命;小米遴荐了用OCC收集,来作念三维建模的使命。但自后,华为在ADS 3.0中接纳了更为先进的GOD收集来处分这个问题,弃用了BEV收集。
然后小米的变焦BEV期间,主要提高了不同场景下对最小识别精度的提高,精度或者在0.05米傍边;用在停车域和城区NOA这种复杂工况下的时候,会相对来说,比传统BEV好用一些(也即是华为ADS 2.0的传统BEV收集)。
再之后的OCC收集,酷好其实和GOD一样,亦然生成三维空间用的,把感知到的信息作念成三维建模。之是以在初期广宽会遴荐BEV+OCC/GOD收集的组合使用,是在OCC/GOD收集莫得达到练习之前,确保感知精度、准确性、车辆安全性等多个角度考量的,简言之单靠OCC/GOD清闲不了这些要求。
现阶段,小米的智能驾驶在期间层面,其实作念到了与华为ADS 2.0皆平的基础。
本色使用,可能遭逢哪些问题?

看完底层期间逻辑之后,其实还是作念到了第一梯队的水准。那么,在使用成果端表面上很难作念不好,而咱们该扎眼的,是这套系统的上限在那儿,和初期的城区NOA成果能达到什么样的使用水平。
这套接济驾驶软件算法能竣事的成果,从前期的测试视频、直播中咱们或者也能摸明晰一些,先说测试中较着作念的很好的成果。在复杂路口的工况下,抉择和操作都相对来说是比拟快,而且糟塌的,这是作念好城区NOA的一个大前提。
然后,说具体工况下的使用情况。
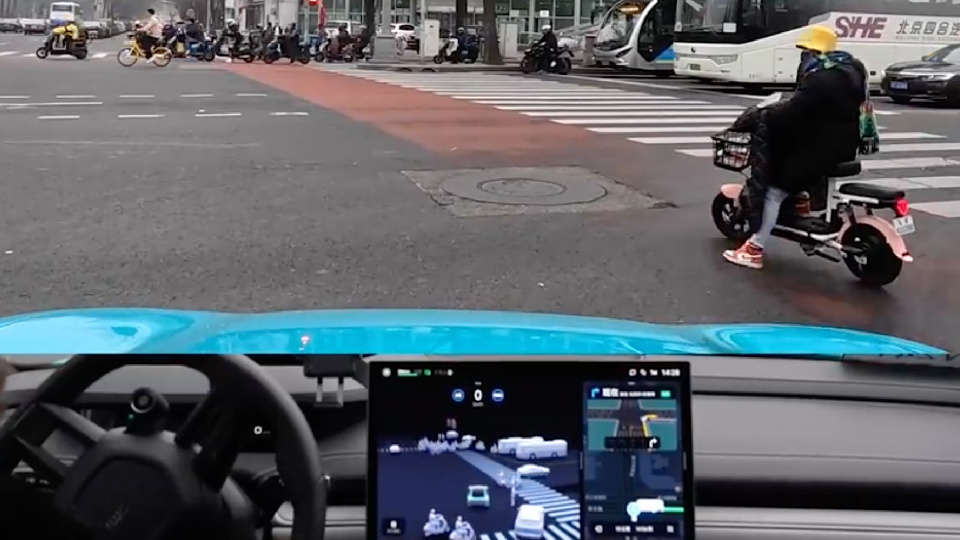
在十字街头的让行上,行东谈主、电动车优先级最高,基本在直行、转弯的时候,遭逢过去通行/短暂窜如的行东谈主或电动车的时候,小米SU7在90%的情况下都会作念出刹停恭候的操作,况兼阐述前哨莫得任何断绝物时候才会加快通行(但这个经由可能需要几秒钟的时期来作念判断),相对来说,是一个比拟保守的通行战术。
还有在面临无序车辆在十字街头拥挤的情况下,小米SU7也和会过作陪算计旅途轮番行驶的格式来通过拥挤路口,统共这个词经由莫得被驾驶员接收,这是一个可以的体验。但,统共这个词经由的操作执行,会有一些“盘桓”和蔓延。
这个工况下,小结一个点,小米SU7的城区NOA在遭逢复杂路口、多车并行通过、无序的情况下的这种“博弈”,是一个统统善良的战术,不激进的去抢车谈,而是在低速行驶恭候契机出现。不才面的工况,也出现了雷同的操作。
左转路口,转完后恭候接下来的直行操作的时候,会遭逢一个情况,让行同路口右转弯车型先行通过;同期,左转弯路口车辆在转弯后,特出虚线车谈线行驶参预直行谈。在这个场景下的决策,有一些不够拟东谈主,这也败露了小米这套智能驾驶系统的一个景象,大多半情况下,是处于相配保守的景象。以上工况,若是是驾驶员躬行开的话,那么,左转弯背面临三条车谈,会优先遴荐无车/车辆较少的车谈通行,而非是恭候右转弯车型先行后再通行,可以作念到同步通行。

天然部单干况下,可以顺利执行操作,况兼决策和算计的行车旅途,大部分都是比拟合理的景象。但,有一些工况其实照旧需要进一步加强,举例,跟车距离(容易被插队)、刹停时候的姿态、起步时候的快速反映等,都是一些比拟查考细节的优化本事。
举座来看小米SU7的智能驾驶部分,大体的框架莫得任何问题,逻辑跑的通,仅仅欠缺细节优化的问题,揣摸会在后续的OTA中去逐渐优化。
然后期待一下它的后续更新,分为几个阶段,握续用BEV+OCC收集的有想象,用这套逻辑把细节处理好,至少处分跟车距离遐迩问题(或者是可以逶迤的一个建立)以及跨车谈行驶的逻辑买通;然后,后续的大版块更新,确定也会弃用BEV收集,在能把2D信息转动为3D建模的收集出现之后,BEV就确切是个遭殃般的存在了(访佛于ADS 2.0到3.0的途径)。
这套智能驾驶系统,还是差未几追平了华为ADS 2.0版块的使用感受,起码在底层逻辑上这个基础作念的挺好的,逻辑高慢、操作速率快这些是优点,但细节上的处理照实莫得作念到荒谬好的精度,和感知成立无关,更多的是算法优化。